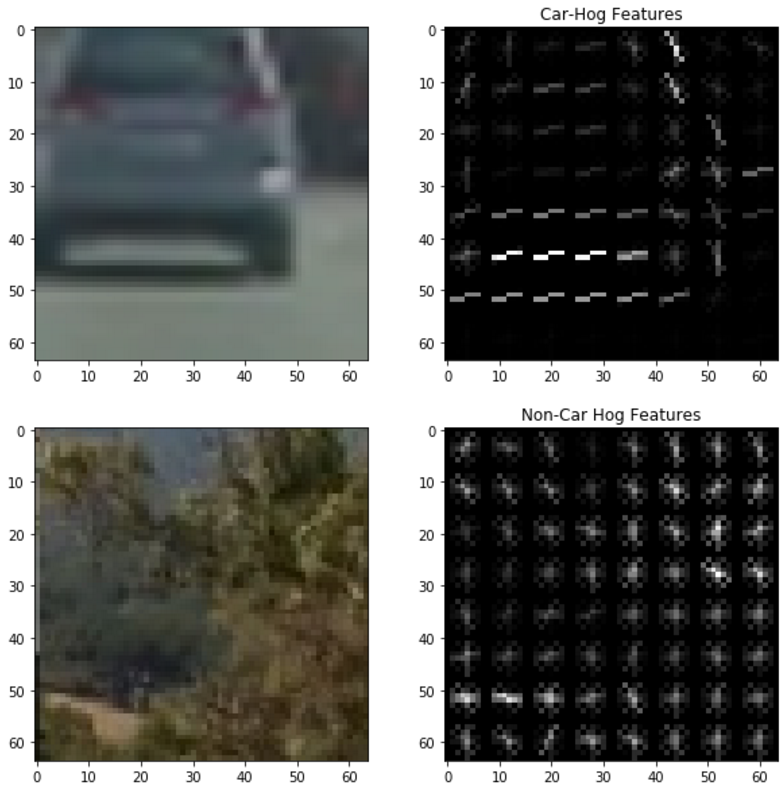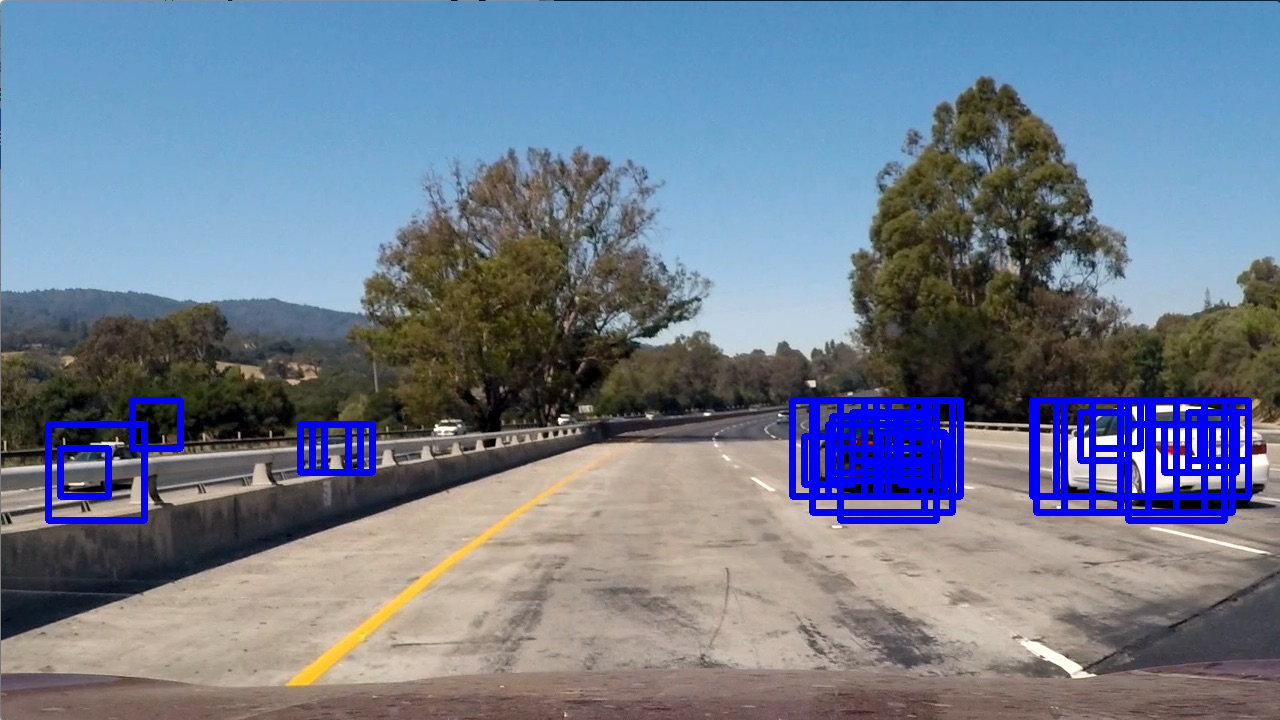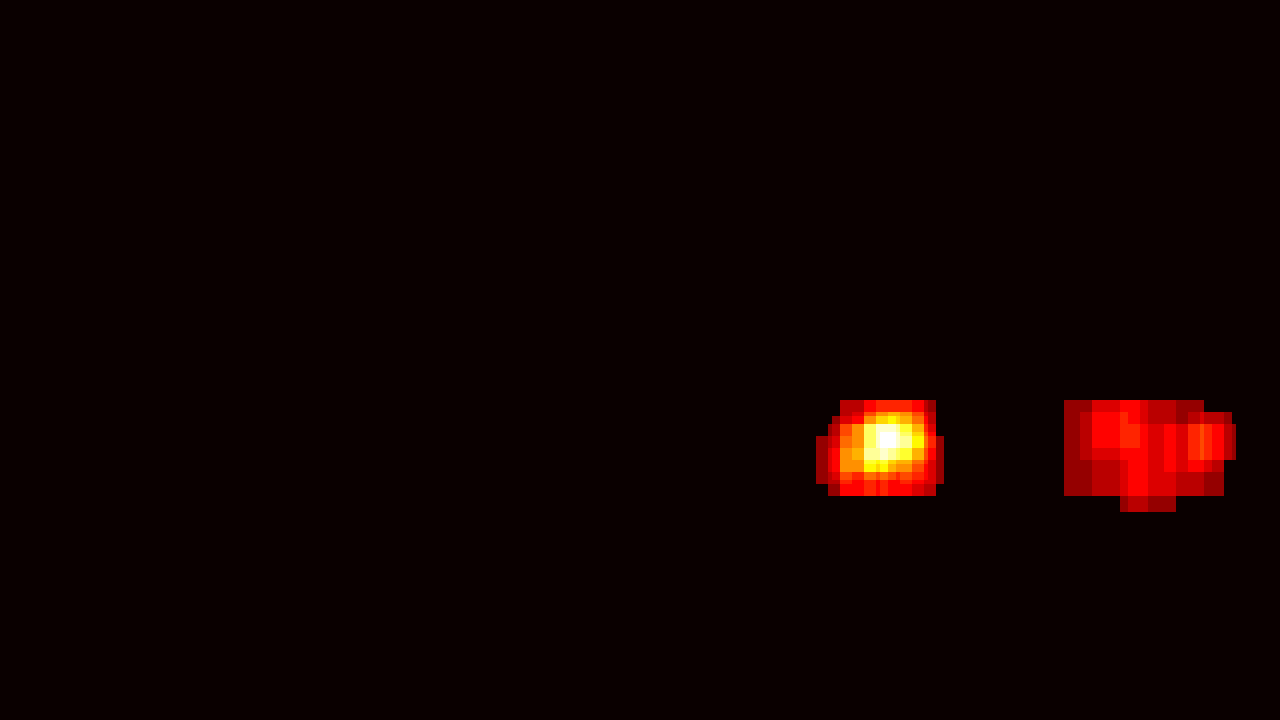
Created a vehicle detection and tracking pipeline with OpenCV, histogram of oriented gradients (HOG), and support vector machines (SVM).
Optimized and evaluated the model on video data from a automotive camera taken during highway driving.
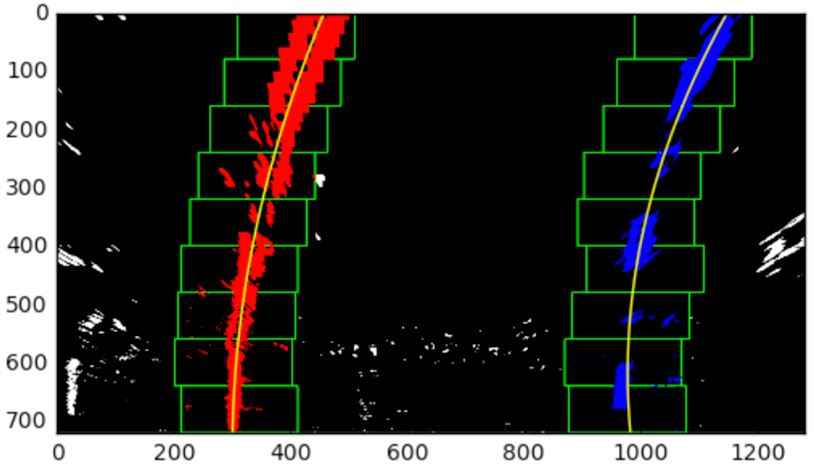
Built an advanced lane-finding algorithm using distortion correction, image rectification, color transforms, and gradient thresholding.
Identified lane curvature and vehicle displacement.
Overcame environmental challenges such as shadows and pavement changes.
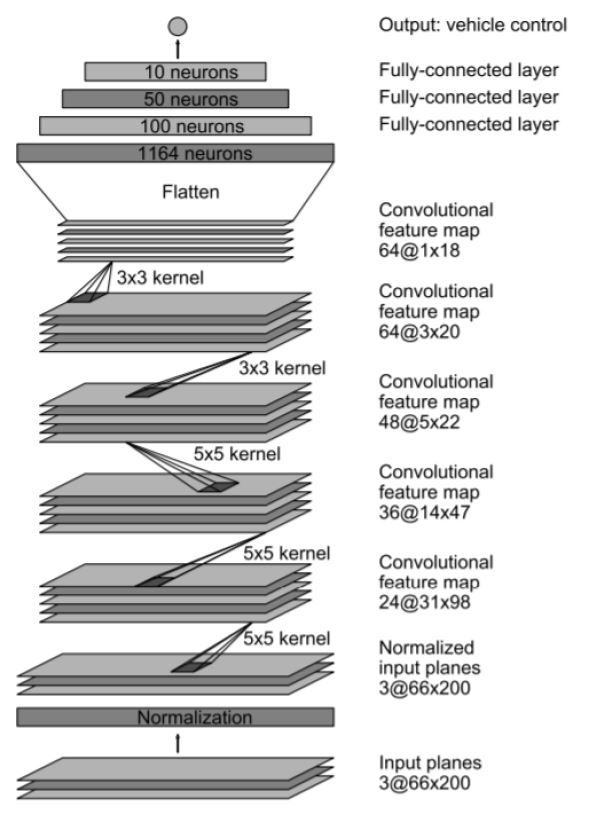
Built and trained a convolutional neural network for end-to-end driving in a simulator, using TensorFlow and Keras.
Used optimization techniques such as regularization and dropout to generalize the network for driving on multiple tracks.
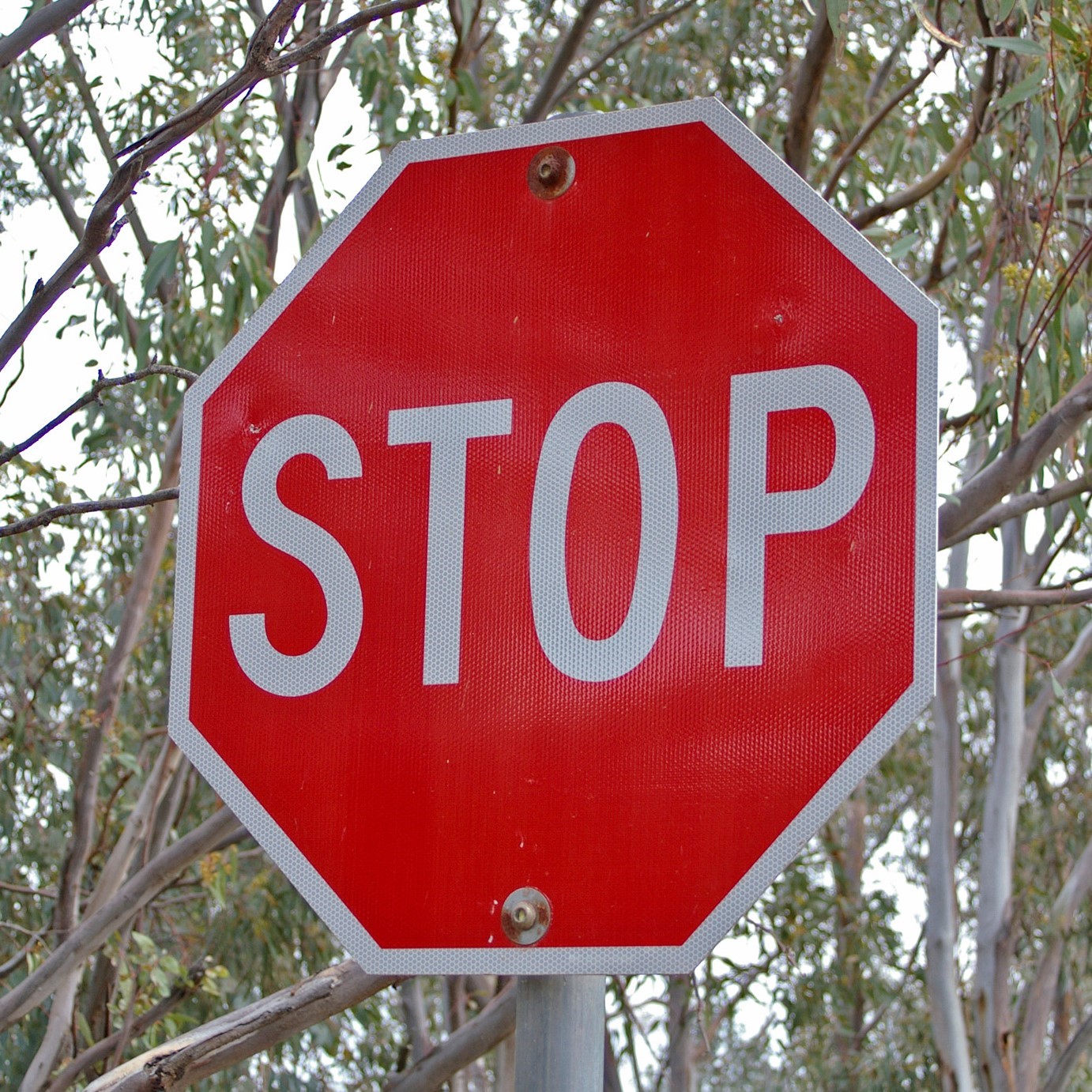
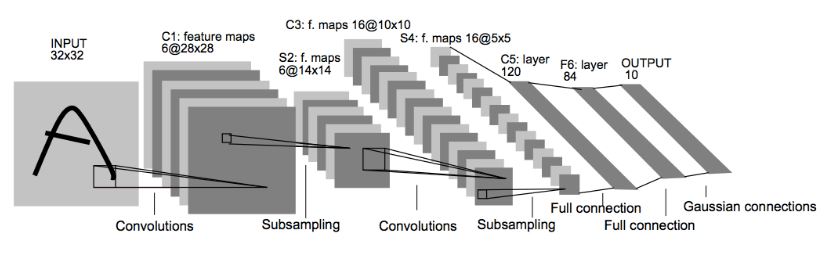
Built and trained a deep neural network to classify traffic signs, using TensorFlow.
Experimented with different network architectures.
Performed image pre-processing and validation to guard against overfitting.
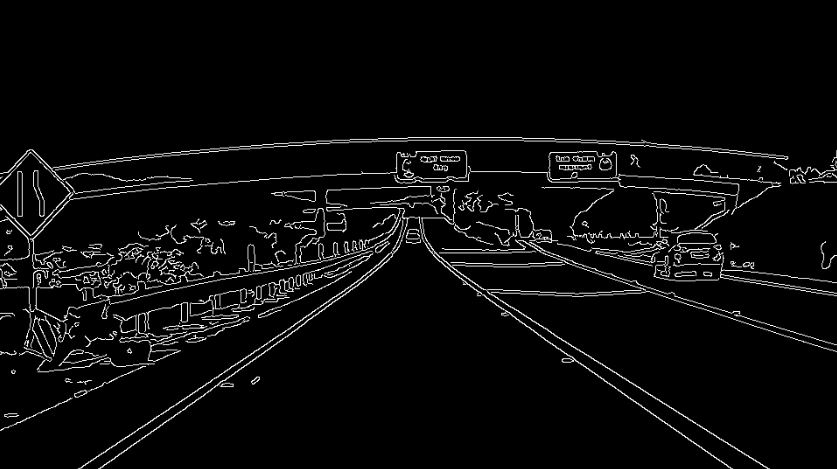
Detected highway lane lines on a video stream.
Used OpenCV image analysis techniques to identify lines, including Hough Transforms and Canny edge detection.